目录
[TOC]
一、常规的移动控制
首先来实现一个最简单的通过点击鼠标控制对象移动的方式:
创建地面Ground,并新建Layer层–9:Ground;创建红色Sphere作为Player,并为其添加显示移动路径的Trail Renderer组件,为移动路线添加绿色材质。
-
Step1:获取鼠标点击位置。
创建
GameManager类来处理鼠标点击位置的获取。对外提供Pos属性–鼠标点击的位置信息。public class GameManager : MonoBehaviour { private Ray mRay => Camera.main.ScreenPointToRay(Input.mousePosition); private Vector3 mPos; public Vector3 Pos => mPos; private void Awake() { mPos = Vector3.zero; } private void Update() { if (Input.GetMouseButton(0)) { RaycastHit raycastHit; if (Physics.Raycast(mRay, out raycastHit, float.MaxValue, 1 << 9)) { mPos = raycastHit.point; } } } } -
Step2:创建
PlayerCtrl脚本,处理对象移动控制逻辑。public class PlayerCtrl : MonoBehaviour { public GameManager Manager; public float MaxVelocity; private void Start() { mCurrentVelocity = new Vector3(1 * MaxVelocity, 0, 0);//初始速度 } private void FixedUpdate() { //不使用Steer引导力,对象直接转向移动 NormalSeek(); } private void NormalSeek() { mCurrentVelocity = Vector3.Normalize(Manager.Pos - transform.position) * MaxVelocity; transform.position += mCurrentVelocity * Time.fixedDeltaTime; } }
结果展示:

可见移动转向不够平滑,太过突兀。
二、Seek寻求
可以使用力来控制对象移动:对象移动过程中,如果遇到方向改变,有两种做法。一种是直接在新的运动方向上赋值速度;另一种是,给对象赋值一个指向目标方向的Steer引导力。具体可见下图:
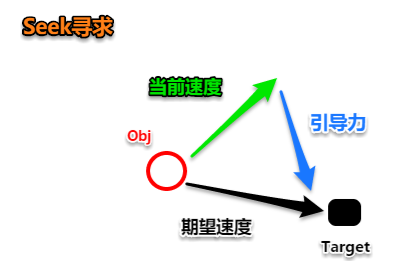
使用Steer引导力来改变对象移动方向的方式可以使得对象转向变得平滑。
代码如下:
public class PlayerCtrl : MonoBehaviour
{
public GameManager Manager;
public float MaxVelocity;
public float MaxForceValue;
public float Mass;
private Vector3 mDesiredVelocity;
private Vector3 mCurrentVelocity;
private Vector3 mSteerForce;
private Vector3 mDesiredDir;
private float mDesiredDis;
private void Start()
{
mCurrentVelocity = new Vector3(1 * MaxVelocity, 0, 0);//初始速度
}
private void FixedUpdate()
{
//不使用Steer引导力,对象直接转向移动
//NormalSeek();
//寻求:通过Steer引导力使对象平滑转向移动
Seek();
}
private void NormalSeek(){......}
/// <summary>
/// 寻求:通过Steer引导力使对象平滑转向移动
/// </summary>
private void Seek()
{
mDesiredDir = Manager.Pos - transform.position;//期望方向:指向鼠标点击方向
mDesiredDis = mDesiredDir.magnitude;//期望距离
mDesiredVelocity = Vector3.Normalize(Manager.Pos - transform.position) * MaxVelocity;
mSteerForce = Vector3.ClampMagnitude(mDesiredVelocity - mCurrentVelocity, MaxForceValue);//引导力:由当前运动方向引导向期望方向
mSteerForce /= Mass;//引导力=>加速度
mCurrentVelocity = Vector3.ClampMagnitude(mCurrentVelocity + mSteerForce, MaxVelocity);//更新当前速度:受引导力影响后的速度
transform.position += mCurrentVelocity * Time.fixedDeltaTime;//更新位置
}
}
如此一来会有新的问题产生:对象当到达目标位置后由于没有处理到达时的逻辑,mSteerForce = Vector3.ClampMagnitude(mDesiredVelocity - mCurrentVelocity, MaxForceValue);会导致对象到达目标点后受到反方向Steer引导力,从而出现震荡运动的问题。
三、Arrival达到
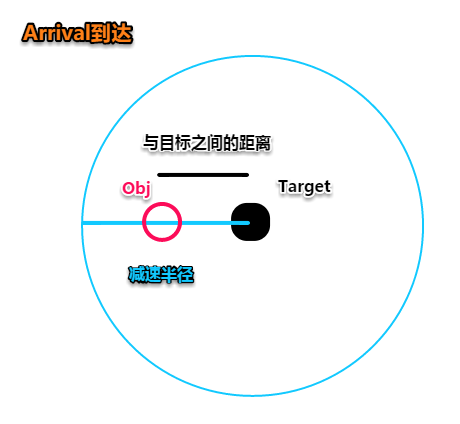
未解决Seek寻求行为中的问题,需要处理到达目标点的逻辑。如下图所示:
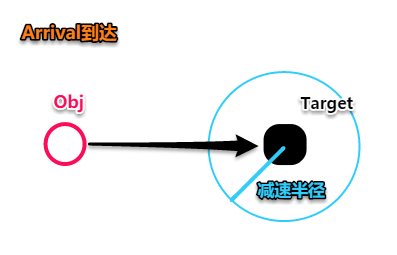
对象到达目标点前应该有一段平滑减速的区域,越接近目标点期望速度应该越小,直至为0。
public class PlayerCtrl : MonoBehaviour
{
......
[Tooltip("到达目的地前的减速半径")]
public float DecelerateRadius = 2f;
......
/// <summary>
/// 寻求:通过Steer引导力使对象平滑转向移动
/// </summary>
private void Seek()
{
mDesiredDir = Manager.Pos - transform.position;//期望方向:指向鼠标点击方向
mDesiredDis = mDesiredDir.magnitude;//期望距离
if (mDesiredDis <= DecelerateRadius)//减速
{
mDesiredVelocity = Vector3.Normalize(Manager.Pos - transform.position) * MaxVelocity * mDesiredDis / DecelerateRadius;//到达目标点后速度为零
}
else//正常移动
{
mDesiredVelocity = Vector3.Normalize(Manager.Pos - transform.position) * MaxVelocity;
}
mSteerForce = Vector3.ClampMagnitude(mDesiredVelocity - mCurrentVelocity, MaxForceValue);//引导力:由当前运动方向引导向期望方向
mSteerForce /= Mass;//引导力=>加速度
mCurrentVelocity = Vector3.ClampMagnitude(mCurrentVelocity + mSteerForce, MaxVelocity);//更新当前速度:受引导力影响后的速度
transform.position += mCurrentVelocity * Time.fixedDeltaTime;//更新位置
}
}
效果展示:
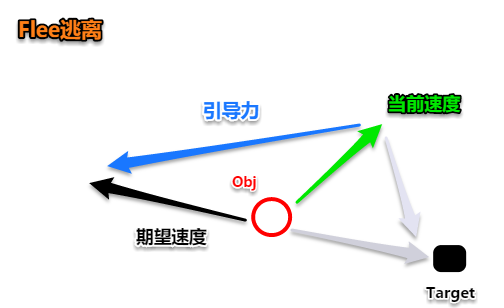
四、Flee逃离
Flee逃离行为:对象在接近目标(障碍物)时,会有一个引导力试图将对象推离障碍物。Flee的期望速度方向正好与Seek的期望速度方向相反。
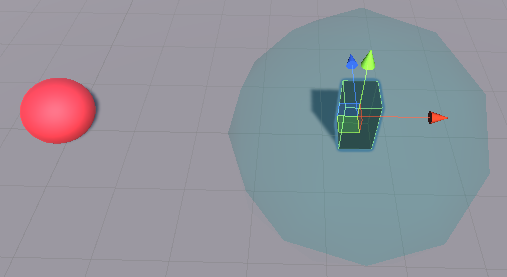
在场景中创建一个灰色Cube命名为Obstacle,并创建同名脚本。
public class Obstacle : MonoBehaviour
{
[SerializeField]
private float mRadius = 2f;
public float Radius => mRadius;
private void OnDrawGizmos()
{
Gizmos.color = new Color(0f, 1f, 1f, 0.2f);//蓝绿色
//将Gizmos按照当前物体的Transform进行坐标转换,转换到世界空间
Gizmos.matrix = transform.localToWorldMatrix;
Gizmos.DrawSphere(Vector3.zero, mRadius);
}
}
OnDrawGizmos()中创建了只在Scene视图中显示的球形障碍半径。
PlayerCtrl脚本:
public class PlayerCtrl : MonoBehaviour
{
......
[SerializeField]
private Obstacle mObstacle = default;
[Tooltip("最大逃离的力的值")]
public float MaxFleeForceValue;
......
private void FixedUpdate()
{
......
Flee();
}
......
/// <summary>
/// 逃离
/// </summary>
private void Flee()
{
if (Vector3.Distance(transform.position, mObstacle.transform.position) < mObstacle.Radius)
{
mDesiredVelocity = -Vector3.Normalize(mObstacle.transform.position - transform.position) * MaxVelocity;//逃离的力的方向与移动到目标方向相反
mSteerForce = Vector3.ClampMagnitude(mDesiredVelocity - mCurrentVelocity, MaxFleeForceValue);//引导力:由当前运动方向引导向期望方向
mSteerForce /= Mass;//引导力=>加速度
mCurrentVelocity = Vector3.ClampMagnitude(mCurrentVelocity + mSteerForce, MaxVelocity);//更新当前速度:受引导力影响后的速度
transform.position += mCurrentVelocity * Time.fixedDeltaTime;//更新位置
}
}
}
效果展示:
五、Wander随机徘徊
对象在没有目标的情况下,通常会进行随机移动,随机移动的实现方式有很多种。比如说以随机的时间间隔设置随机目标,但用此方法对象通常会进行大幅度的转向,很多时候看起来会很奇怪,就好像一个人一会儿向前走,一会儿又后退,这种交替前进后退如果太过频繁看起来就显得有违常理。
此方法的便捷之处在于实现简单,结合之前的Seek和Arrival行为可快速实现。
添加RandomTarget脚本来生成随机目标:
public class RandomTarget : MonoBehaviour
{
[Tooltip("随机目标的范围半径")]
public float Radius;
private Vector3 mPos = default;
public Vector3 Pos
{
get
{
mPos = Random.insideUnitSphere * Radius;
return mPos;
}
private set { mPos = value; }
}
private void OnDrawGizmos()
{
if (mPos == default) return;
Gizmos.color = Color.black;
Gizmos.DrawSphere(new Vector3(mPos.x, 0.01f, mPos.z), 0.1f);
}
}
随机移动的脚本:
public class RandomSeekBehavior : MonoBehaviour
{
public RandomTarget RandomTarget;
public float MaxVelocity;
public float MaxForceValue;
public float Mass;
[Tooltip("到达目的地前的减速半径")]
public float DecelerateRadius = 2f;
private Vector3 mDesiredVelocity;
private Vector3 mCurrentVelocity;
private Vector3 mSteerForce;
private Vector3 mDesiredDir;
private float mDesiredDis;
private float mInterval;
private float mTimer;
private Vector3 mTargetPos = default;
private void Start()
{
mInterval = UnityEngine.Random.Range(1f, 2f);
}
private void FixedUpdate()
{
mTimer += Time.fixedDeltaTime;
if (mTimer >= mInterval)
{
mTimer -= mInterval;
mInterval = UnityEngine.Random.Range(1f, 2f);
Vector3 pos = RandomTarget.Pos;
mTargetPos = new Vector3(pos.x, 0f, pos.z);
}
Seek(mTargetPos);
}
/// <summary>
/// 寻求:通过Steer引导力使对象平滑转向移动
/// </summary>
private void Seek(Vector3 targetPos)
{
mDesiredDir = targetPos - transform.position;//期望方向:指向鼠标点击方向
mDesiredDis = mDesiredDir.magnitude;//期望距离
if (mDesiredDis <= DecelerateRadius)//减速
{
mDesiredVelocity = Vector3.Normalize(targetPos - transform.position) * MaxVelocity * mDesiredDis / DecelerateRadius;//到达目标点后速度为零
}
else//正常移动
{
mDesiredVelocity = Vector3.Normalize(targetPos - transform.position) * MaxVelocity;
}
mSteerForce = Vector3.ClampMagnitude(mDesiredVelocity - mCurrentVelocity, MaxForceValue);//引导力:由当前运动方向引导向期望方向
mSteerForce /= Mass;//引导力=>加速度
mCurrentVelocity = Vector3.ClampMagnitude(mCurrentVelocity + mSteerForce, MaxVelocity);//更新当前速度:受引导力影响后的速度
transform.position += mCurrentVelocity * Time.fixedDeltaTime;//更新位置
}
}
效果如下:
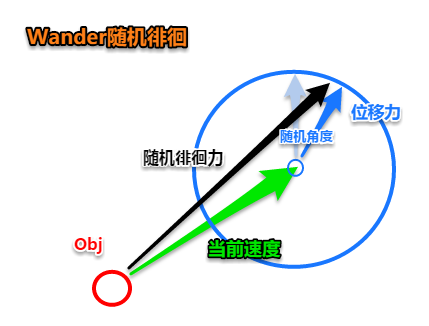
对象随机移动在每一次目标改变的时候都显得很突兀,改进的方式是加快对象移动方向改变的频率,使得对象在每一帧都改变移动方向,且每一次改变的方向大小均在45度以内。如此一来,对象的随机移动就会显得十分平滑。
如何控制对象移动方向的改变呢?方法和上述一样,通过力来改变对象运动方向,称此力为WanderForce随机徘徊力。可以想象对象前方有一个圆圈,圆心就在对象当前移动方向上,而对象与圆上随机一点的连线就是随机徘徊力。如下图所示:
代码:
/*
* 在对象前增加一个指示运动方向的圆
* 限制了对象每一帧运动方向改变的大小,防止对象随机徘徊中运行方向突变超过45度。
*/
public class WanderBehavior : MonoBehaviour
{
/*
* 如果mCircleDistance>>mCircleRadius时,
* mWanderForce对速度的影响可忽略不计,
* 即对象不改变移动方向
*/
[SerializeField, Tooltip("圆心到对象的距离"), Range(1f, 5f)]
private float mCircleDistance = 2f;
[SerializeField, Tooltip("圆半径")]
private float mCircleRadius = 1f;
[SerializeField, Tooltip("质量")]
private float mMass = 1f;
private Vector3 mCurrentVelocity;
[SerializeField, Tooltip("最大速度"), Range(0.1f, 8f)]
private float mMaxVelocity = 5f;
/// <summary>
/// 指向圆心方向
/// </summary>
private Vector3 mCircleCenterVector3;
/// <summary>
/// 位移的力(与圆半径正比例)
/// </summary>
private Vector3 mDisplacementForce;
/// <summary>
/// 位移力的方向
/// </summary>
private Vector3 mDisplacementDir;
/// <summary>
/// 顺时针方向的夹角
/// </summary>
private float mCurrentAngle;
private Vector3 mWanderForce;
//[SerializeField, Tooltip("最大随机徘徊力")]
//private float mMaxWanderForce = 5f;
private SpawnZone Spawner;
private void Start()
{
Vector3 randomV3 = Random.onUnitSphere;
//Vector3 randomV3 = new Vector3(0f, 0f, 1f);
mCurrentVelocity = Vector3.ClampMagnitude(new Vector3(randomV3.x, 0f, randomV3.z), mMaxVelocity);
mDisplacementDir = new Vector3(0f, 0f, 1f);//默认指向Z轴正方向
mCurrentAngle = 0f;
Spawner = GameObject.FindWithTag("SpawnZone").GetComponent<SpawnZone>();
}
private void Update()
{
if (Vector3.Distance(transform.position, Vector3.zero) > Spawner.Radius)
{
Spawner.Recycle(transform);
}
}
private void FixedUpdate()
{
Wander();
}
private void Wander()
{
//指向圆心方向:
mCircleCenterVector3 = mCurrentVelocity.normalized * mCircleDistance;
//位移力:
SetAngle(out mDisplacementDir, mCurrentAngle);
mDisplacementForce = mDisplacementDir * mCircleRadius;
//随机徘徊力:
//随机徘徊力不受最大随机徘徊力影响,只受mCircleDistance、mCircleRadius、mDisplacementDir影响
//mWanderForce = Vector3.ClampMagnitude(mCircleCenterVector3 + mDisplacementForce, mMaxWanderForce);
mWanderForce = mCircleCenterVector3 + mDisplacementForce;
mWanderForce /= mMass;//随机徘徊力=>加速度
mCurrentVelocity = Vector3.ClampMagnitude(mCurrentVelocity + mWanderForce, mMaxVelocity);//更新当前速度:受随机徘徊力影响后的速度
transform.position += mCurrentVelocity * Time.fixedDeltaTime;//更新位置
//更新
mCurrentAngle = Random.Range(0f, 2f * Mathf.PI);
}
private void SetAngle(out Vector3 vec, float angle)
{
vec = new Vector3(Mathf.Sin(angle), 0f, Mathf.Cos(angle)) * mCircleRadius;
}
}
创建多个小球来展示随机徘徊,创建代码:(超出生成半径会回收并在原点重新创建)
public class SpawnZone : MonoBehaviour
{
[SerializeField, Tooltip("生成数量")]
private int mSpawnCount = 3;
[SerializeField, Tooltip("生成半径")]
private float mRadius = 5f;
[SerializeField, Tooltip("待生成对象")]
private GameObject mPrefab = default;
/// <summary>
/// 缓存生成出来的对象
/// </summary>
private List<Transform> ObjectList;
/// <summary>
/// 生成半径
/// </summary>
public float Radius => mRadius;
private void Start()
{
ObjectList = new List<Transform>();
for (int i = 1; i <= mSpawnCount; i++)
{
Spawn();
}
}
public void Spawn()
{
GameObject go = Instantiate(mPrefab, Vector3.zero, Quaternion.identity, transform);
ObjectList.Add(go.transform);
}
public void Recycle(Transform obj)
{
ObjectList.Remove(obj);
Spawn();
Destroy(obj.gameObject);
}
}
效果如下:

六、重构代码
为了后续行为编写方便,现在重构一下当前代码。
创建AI行为的枚举,增加代码可读性:
public enum AIBehaviorType
{
None,
/// <summary>
/// 寻求行为
/// </summary>
Seek,
/// <summary>
/// 逃离行为
/// </summary>
Flee,
/// <summary>
/// 随机徘徊行为
/// </summary>
Wander,
/// <summary>
/// 追踪行为
/// </summary>
Pursuit,
/// <summary>
/// 逃避行为
/// </summary>
Evade,
/// <summary>
/// 避开行为
/// </summary>
Avoidance,
}
创建MovementMgr脚本,在脚本内部处理所有行为的逻辑,对外开放的API:
public bool Add(AIBehaviorType behavior)添加行为public bool Remove(AIBehaviorType behavior)移除行为public void Reset()重置
脚本继承自MonoBehaviour,所以使用Unity自带的序列化功能来配置行为参数。
完整代码:
public class MovementMgr : MonoBehaviour
{
#region config
[SerializeField, Tooltip("质量")]
private float mMass = 1f;
[SerializeField, Tooltip("最大速度")]
private float mMaxVelocity = 5f;
[SerializeField, Tooltip("最大引导力")]
private float mMaxSteerForce = 0.2f;
[SerializeField, Tooltip("减速半径")]
private float mDecelerateRadius = 3f;
[SerializeField, Tooltip("警戒半径,用于Flee逃离行为")]
private float mWarningRadius = 3f;
[SerializeField, Tooltip("最大逃离力")]
private float mMaxFleeForce = 0.2f;
/*
* 在对象前增加一个指示运动方向的圆
* 限制了对象每一帧运动方向改变的大小,防止对象随机徘徊中运行方向突变超过45度。
* 如果mCircleDistance>>mCircleRadius时,
* mWanderForce对速度的影响可忽略不计,
* 即对象不改变移动方向
*/
[SerializeField, Tooltip("圆心到对象的距离"), Range(1f, 5f)]
private float mCircleDistance = 1.5f;
[SerializeField, Tooltip("圆半径")]
private float mCircleRadius = 1f;
[SerializeField, Tooltip("最大随机徘徊力")]
private float mMaxWanderForce = 5f;
#endregion
private Vector3 mCurrentVelocity;
private MovementMgr mTarget;
private Vector3 mTargetPos = Vector3.one * int.MaxValue;
private List<MovementMgr> mHunterList = new List<MovementMgr>();
private Vector3 mSumSteerForce;
private List<AIBehaviorType> mBehaviorList = new List<AIBehaviorType>();
/// <summary>
/// 指向圆心方向
/// </summary>
private Vector3 mCircleCenterVector3;
/// <summary>
/// 位移的力(与圆半径正比例)
/// </summary>
private Vector3 mDisplacementForce;
/// <summary>
/// 位移力的方向
/// </summary>
private Vector3 mDisplacementDir = new Vector3(0f, 0f, 1f);//默认指向Z轴正方向;
/// <summary>
/// 顺时针方向的夹角
/// </summary>
private float mCurrentAngle = 0f;
private Vector3 mWanderForce;
public float Mass => mMass;
public float MaxVelocity => mMaxVelocity;
public float MaxSteerForce => mMaxSteerForce;
public float DecelerateRadius => mDecelerateRadius;
public float WarningRadius => mWarningRadius;
public Vector3 CurrentVelocity => mCurrentVelocity;
public MovementMgr Target
{
get
{
Debug.Assert(mTarget != null, "未设置移动管理器中的Target!");
return mTarget;
}
set { mTarget = value; }
}
public Vector3 TargetPos
{
get
{
//未赋值mTargetPos的时候会自动使用Target
if (mTargetPos == Vector3.one * int.MaxValue) return Target.transform.position;
return mTargetPos;
}
set { mTargetPos = value; }
}
public List<MovementMgr> HunterList
{
get
{
Debug.Assert(mHunterList != null && mHunterList.Count > 0, "未设置移动管理器中的Obstacle!");
return mHunterList;
}
set
{
if (mHunterList == null)
{
mHunterList = new List<MovementMgr>();
}
mHunterList = value;
}
}
#region unity生命周期
private void Awake()
{
Reset();
}
private void FixedUpdate()
{
FrameUpdate();
}
#endregion
#region public function
/// <summary>
/// 添加AI行为
/// </summary>
/// <param AI行为="behavior"></param>
/// <returns></returns>
public bool Add(AIBehaviorType behavior)
{
AddBehavior(behavior);
mBehaviorList.Add(behavior);
return true;
}
/// <summary>
/// 移除AI行为
/// </summary>
/// <param AI行为="behavior"></param>
/// <returns></returns>
public bool Remove(AIBehaviorType behavior)
{
if (mBehaviorList.Contains(behavior) == false) return false;
mBehaviorList.Remove(behavior);
return true;
}
/// <summary>
/// 重置移动管理器
/// </summary>
public void Reset()
{
mBehaviorList.Clear();
mHunterList.Clear();
mCurrentVelocity = Vector3.zero;
mSumSteerForce = Vector3.zero;
}
#endregion
#region private function
private void AddBehavior(AIBehaviorType behavior)
{
switch (behavior)
{
case AIBehaviorType.None:
AddSteerForce(Vector3.zero);
break;
case AIBehaviorType.Seek:
AddSteerForce(CalculateSeek());
break;
case AIBehaviorType.Flee:
AddSteerForce(CalculateFlee());
break;
case AIBehaviorType.Wander:
AddSteerForce(CalculateWander());
break;
default:
Debug.Assert(false, "尚未处理添加" + behavior + "行为的逻辑!");
break;
}
}
private void AddSteerForce(Vector3 steerForce)
{
mSumSteerForce += steerForce;
}
private void FrameUpdate()
{
for (int i = 0; i < mBehaviorList.Count; i++)
{
AddBehavior(mBehaviorList[i]);
}
mCurrentVelocity = Vector3.ClampMagnitude(mCurrentVelocity + mSumSteerForce, mMaxVelocity);
mCurrentVelocity = new Vector3(mCurrentVelocity.x, 0f, mCurrentVelocity.z);//锁定Y轴
transform.position += mCurrentVelocity * Time.fixedDeltaTime;
transform.LookAt(transform.position + mCurrentVelocity);
mSumSteerForce = Vector3.zero;//重置合力
}
private void SetAngle(out Vector3 vec, float angle)
{
vec = new Vector3(Mathf.Sin(angle), 0f, Mathf.Cos(angle)) * mCircleRadius;
}
#endregion
#region 计算AI行为产生的引导力
/// <summary>
/// 寻求行为
/// </summary>
private Vector3 CalculateSeek()
{
//Vector3 desiredVelocity = Target.transform.position - transform.position;
Vector3 desiredVelocity = TargetPos - transform.position;
float desiredDistance = desiredVelocity.magnitude;
if (mDecelerateRadius >= 0.01f && desiredDistance < mDecelerateRadius)
{
desiredVelocity = desiredVelocity.normalized * mMaxVelocity * desiredDistance / mDecelerateRadius;
}
else
{
desiredVelocity = desiredVelocity.normalized * mMaxVelocity;
}
return Vector3.ClampMagnitude(desiredVelocity - mCurrentVelocity, mMaxSteerForce) / mMass;
}
private Vector3 CalculateSeek(Vector3 pos)
{
Vector3 desiredVelocity = pos - transform.position;
float desiredDistance = desiredVelocity.magnitude;
if (mDecelerateRadius >= 0.01f && desiredDistance < mDecelerateRadius)
{
desiredVelocity = desiredVelocity.normalized * mMaxVelocity * desiredDistance / mDecelerateRadius;
}
else
{
desiredVelocity = desiredVelocity.normalized * mMaxVelocity;
}
return Vector3.ClampMagnitude(desiredVelocity - mCurrentVelocity, mMaxSteerForce) / mMass;
}
/// <summary>
/// 逃离行为(逃离Hunter)
/// </summary>
private Vector3 CalculateFlee()
{
Vector3 sum = Vector3.zero;
for (int i = 0; i < HunterList.Count; i++)
{
sum += CalculateSimpleFlee(HunterList[i]);
}
return sum;
}
private Vector3 CalculateSimpleFlee(MovementMgr obstacle)
{
if (Vector3.Distance(obstacle.transform.position, transform.position) < mWarningRadius)
{
Vector3 desiredVelocity = (transform.position - obstacle.transform.position).normalized * mMaxVelocity;
return Vector3.ClampMagnitude(desiredVelocity - mCurrentVelocity, mMaxFleeForce) / mMass;
}
return Vector3.zero;
}
private Vector3 CalculateFleeFromPos(Vector3 pos)
{
if (Vector3.Distance(pos, transform.position) < mWarningRadius)
{
Vector3 desiredVelocity = (transform.position - pos).normalized * mMaxVelocity;
return Vector3.ClampMagnitude(desiredVelocity - mCurrentVelocity, mMaxFleeForce) / mMass;
}
return Vector3.zero;
}
/// <summary>
/// 随机徘徊
/// </summary>
private Vector3 CalculateWander()
{
//指向圆心方向:
mCircleCenterVector3 = mCurrentVelocity.normalized * mCircleDistance;
//位移力:
SetAngle(out mDisplacementDir, mCurrentAngle);
mDisplacementForce = mDisplacementDir * mCircleRadius;
//更新
mCurrentAngle = Random.Range(0f, 2f * Mathf.PI);
//随机徘徊力:
//随机徘徊力不受最大随机徘徊力影响,只受mCircleDistance、mCircleRadius、mDisplacementDir影响
return Vector3.ClampMagnitude(mCircleCenterVector3 + mDisplacementForce, mMaxWanderForce) / mMass;
//return mCircleCenterVector3 + mDisplacementForce;
}
#endregion
}
七、Pursuit追踪
追踪行为旨在追踪目标未来的位置,而不是跟随目标路径行走。通过目标的当前速度来预测目标未来的位置,如下图:
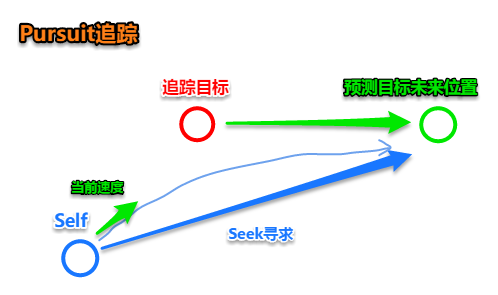
目标未来位置 = 目标当前位置 + 目标当前速度 * 预测时间 * 预测能力
mPredictionPos = Target.transform.position + Target.CurrentVelocity * mPredictionTime * mPredictionPower;
其中:
-
预测时间:= 与目标之间的距离 / 目标的速度 = 目标经过多少秒可到达自身位置
mPredictionTime = Vector3.Distance(transform.position, Target.transform.position) / Target.MaxVelocity;预测时间是一个动态变化值,如此设置,是为了保障:1.在距离目标较远的时候可以多做一点预测,以求以较短路径追踪目标;2.在足够接近目标的时候不需要做出过多的预测,目标就在眼前,直接到达目标位置即可。
-
预测能力:在0到1之间取值,值越大表明追踪目标所作出的预测越合理,预测能力越强。
代码:
[SerializeField, Tooltip("预测能力"), Range(0f, 1f)]//预测能力理论上不能超过1,否则会出现反常行为
private float mPredictionPower = 0.8f;
private float mPredictionTime;
private Vector3 mPredictionPos;
public Vector3 PredictionPos => mPredictionPos;
......
private void AddBehavior(AIBehaviorType behavior)
{
switch (behavior)
{
......
case AIBehaviorType.Pursuit:
AddSteerForce(CalculatePursuit());
break;
default:
Debug.Assert(false, "尚未处理添加" + behavior + "行为的逻辑!");
break;
}
}
......
/// <summary>
/// 追踪行为
/// </summary>
private Vector3 CalculatePursuit()
{
mPredictionTime = Vector3.Distance(transform.position, Target.transform.position) / Target.MaxVelocity;//预测时间(根据间距动态改变)
mPredictionTime = mPredictionTime > 3f ? 3f : mPredictionTime;
mPredictionPos = Target.transform.position + Target.CurrentVelocity * mPredictionTime * mPredictionPower;
return CalculateSeek(mPredictionPos);
}
......
创建PlayerController1脚本处理鼠标点击,对象移动的逻辑。
public class PlayerContoller1 : MonoBehaviour
{
[SerializeField, Tooltip("移动控制器")]
private MovementMgr mMoveMgr = default;
[SerializeField, Tooltip("游戏管理器")]
private StudyPrimaryAI.GameManager mGameMgr = default;
private void Start()
{
mMoveMgr.TargetPos = mGameMgr.Pos;
mMoveMgr.Add(AIBehaviorType.Seek);
}
private void FixedUpdate()
{
mMoveMgr.TargetPos = mGameMgr.Pos;
}
}
创建PlayerController2脚本处理对象追踪的逻辑。
public class PlayerContoller2 : MonoBehaviour
{
[SerializeField, Tooltip("移动控制器")]
private MovementMgr mMoveMgr = default;
[SerializeField, Tooltip("目标")]
private MovementMgr mTarget = default;
private void Start()
{
mMoveMgr.Target = mTarget;
mMoveMgr.Add(AIBehaviorType.Pursuit);
}
private void OnDrawGizmos()
{
if (Application.isPlaying == false) return;
Gizmos.color = Color.gray;
Gizmos.DrawSphere(mMoveMgr.PredictionPos, 0.2f);//显示预测位置
}
}
效果展示:
八、Evade逃避
逃避行为同追踪行为相反,逃避是对目标未来位置进行预测,然后逃离目标未来的位置。
代码:
......
private void AddBehavior(AIBehaviorType behavior)
{
switch (behavior)
{
......
case AIBehaviorType.Evade:
AddSteerForce(CalculateEvade());
break;
default:
Debug.Assert(false, "尚未处理添加" + behavior + "行为的逻辑!");
break;
}
}
......
/// <summary>
/// 逃避行为
/// </summary>
private Vector3 CalculateEvade()
{
mPredictionTime = Vector3.Distance(transform.position, Target.transform.position) / Target.MaxVelocity;//预测时间(根据间距动态改变)
mPredictionTime = mPredictionTime > 2f ? 2f : mPredictionTime;
mPredictionPos = Target.transform.position + Target.CurrentVelocity * mPredictionTime * mPredictionPower;
return CalculateFleeFromPos(mPredictionPos);
}
效果展示:
九、Avoidance避开
避开行为指的是避开障碍物,使用力的方式代替路径规划以避开障碍物。

判断”Ahead1 Ahead2“线段是否与圆相交,以及对象是否在圆内,如果是,则对象会受到避开的力使对象远离障碍物。
private bool LineIntersectCircle(Vector3 head1, Vector3 head2, Vector3 circleCenter, float radius)
{
return Vector3.Distance(head1, circleCenter) < radius || Vector3.Distance(head2, circleCenter) < radius || Vector3.Distance(transform.position, circleCenter) < radius;
}
对象前方可能有很多障碍物,但是对象只需要避开第一个即可。获取距离对象最近的障碍物的方法:
private MovementMgr GetNearestObstacle(List<MovementMgr> obstacleList)
{
MovementMgr nearestObstacle = null;
for (int i = 0; i < obstacleList.Count; i++)
{
//与障碍物发生碰撞
bool intersect = LineIntersectCircle(mAhead1, mAhead2, obstacleList[i].transform.position, mCircleRadius);
if (intersect && (nearestObstacle == null || Vector3.Distance(obstacleList[i].transform.position, transform.position) < Vector3.Distance(nearestObstacle.transform.position, transform.position)))
{
nearestObstacle = obstacleList[i];
}
}
return nearestObstacle;
}
计算避让的力的方法:
[SerializeField, Tooltip("Ahead线段长度(视野)")]
private float mAheadLength = 4f;
[SerializeField, Tooltip("障碍物影响半径,用于Avoidance避开行为")]
private float mObstacleRadius = 3f;
[SerializeField, Tooltip("最大避开力")]
private float mMaxAvoidanceForce = 0.4f;
private List<MovementMgr> mObstacleList = new List<MovementMgr>();
private Vector3 mAhead1;
private Vector3 mAhead2;
......
public List<MovementMgr> ObstacleList
{
get
{
Debug.Assert(mObstacleList != null && mObstacleList.Count > 0, "未设置移动管理器中的Obstacle!");
return mObstacleList;
}
set
{
if (mObstacleList == null)
{
mObstacleList = new List<MovementMgr>();
}
mObstacleList = value;
}
}
public Vector3 Ahead1 => mAhead1;
public Vector3 Ahead2 => mAhead2;
public float ObstacleRadius => mObstacleRadius;
......
private void AddBehavior(AIBehaviorType behavior)
{
switch (behavior)
{
......
case AIBehaviorType.Avoidance:
AddSteerForce(CalculateAvoidance());
break;
default:
Debug.Assert(false, "尚未处理添加" + behavior + "行为的逻辑!");
break;
}
}
......
private Vector3 CalculateAvoidance()
{
mAhead1 = transform.position + (mCurrentVelocity / mMaxVelocity) * mAheadLength;
mAhead2 = transform.position + (mCurrentVelocity / mMaxVelocity) * mAheadLength * 0.5f;
MovementMgr nearestObstacle = GetNearestObstacle(mObstacleList);
if (nearestObstacle)
{
return Vector3.ClampMagnitude(mAhead1 - nearestObstacle.transform.position, mMaxAvoidanceForce) / mMass;
}
return Vector3.zero;
}
效果展示:
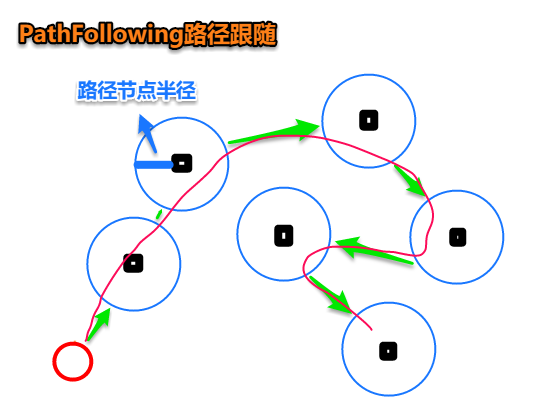
十、PathFollowing路径跟随
使用List存储路径节点,结合Seek行为完成路径跟随。
mPathRadius路径节点半径:只要对象达到半径范围以内则视作其到达了路径节点,可以前往下一个路径节点。如此一来可以使得路径跟随行为更符合常理–总会在既定的路径中寻找较短的路线移动。
代码:
[SerializeField, Tooltip("路径节点半径"), Range(0f, 5f)]
private float mPathRadius = 1f;
private List<PathNode> mPaths = new List<PathNode>();
private int mCurrentPathNode;
/// <summary>
/// 路径步长
/// </summary>
private int mPathsStep = -1;
public List<PathNode> Paths
{
get
{
Debug.Assert(mPaths != null && mPaths.Count > 0, "未设置移动管理器中的移动路径Paths!");
return mPaths;
}
set
{
if (mPaths == null)
{
mPaths = new List<PathNode>();
}
mPaths = value;
}
}
......
private void AddBehavior(AIBehaviorType behavior)
{
switch (behavior)
{
......
case AIBehaviorType.PathsFollow:
AddSteerForce(CalculatePathsFollow());
break;
default:
Debug.Assert(false, "尚未处理添加" + behavior + "行为的逻辑!");
break;
}
}
......
/// <summary>
/// 路径跟随行为
/// </summary>
private Vector3 CalculatePathsFollow()
{
if (Vector3.Distance(transform.position, Paths[mCurrentPathNode].transform.position) < mPathRadius)
{
if (mCurrentPathNode >= mPaths.Count - 1 || mCurrentPathNode <= 0)//循环移动
{
mPathsStep *= -1;
}
mCurrentPathNode += mPathsStep;
}
//Seek行为
Vector3 desiredVelocity = (Paths[mCurrentPathNode].transform.position - transform.position).normalized * mMaxVelocity;
return Vector3.ClampMagnitude(desiredVelocity - mCurrentVelocity, mMaxSteerForce) / mMass;
}
效果展示: